Eficiența energetică a fost, este și va fi unul dintre principalele subiecte de interes pentru societatea modernă. În absolut orice industrie, indiferent de domeniul de activitate, fiecare companie își propune, prin produsele pe care le vinde, să consume mai puțină energie și să ofere performanțe mai ridicate. Factorul de putere este unul dintre acei factori care pot afecta serios eficiența energetică în diferite sisteme electrice, cu excepția cazului în care se iau măsuri, așa cum vom vedea mai jos.
Înainte de a trece la partea tehnică, voi încerca să prezint o analogie, astfel încât să înțelegeți ce este de fapt factorul de putere. În micul nostru experiment, vom considera un cărucior care merge ca un tren pe calea ferată și poate fi remorcat de o persoană (Fig. 1). După cum știm, indiferent de poziția persoanei, căruciorul nu își va schimba direcția, bineînțeles, excludem ideea că căruciorul sare de pe calea ferată.
fig. 1
Dacă persoana care remorchează căruciorul nu se află exact în mijlocul șinelor, întotdeauna între poziția personală și direcția de deplasare a căruciorului va exista un unghi, pe care în fig. 1 l-am notat ca . Acum vom propune câteva situații posibile în care puteți găsi persoana, în timp ce remorcați căruciorul.
Situația 1. În această situație, considerăm că unghiul dintre poziția persoanei care remorchează căruciorul și direcția sa de deplasare este foarte mare, tinde spre 90 de grade (Fig. 2). Când persoana începe să remorcheze căruciorul, nu va fi deloc surprinsă că a
fig.2
depus un efort serios, care va consuma suficient din energia sa, iar căruciorul se va mișca foarte puțin, chiar mai mult, când unghiul este exact de 90 de grade, va consuma toată energia pe care o deține, iar căruciorul nu se va mișca deloc. Dacă am fi instalat un contor de energie, acesta ar înregistra toată energia consumată, chiar dacă mișcarea căruciorului este aproape de 0.
Situația 2. Fiind în situația 1, persoana nu va accepta să remorcheze căruciorul în astfel de condiții, complet nefavorabile pentru ea și, pas cu pas, se va deplasa ușor spre centrul șinelor, unde unghiul dintre poziția sa și direcția căruciorului tinde să fie de zero grade (Fig. 3). Pe măsură ce se apropie de centrul șinei, își va da seama că
fig. 3
efortul se reflectă în mișcarea căruciorului și, mai mult, când unghiul devine zero, își dă seama că toată energia consumată pentru remorcarea căruciorului se reflectă în mișcarea acestuia și, bineînțeles, va încerca să mențină această poziție în jurul valorii zero. De data aceasta, contorul nostru de energie înregistrează aceeași energie consumată, dar căruciorul s-a mișcat așa cum era de așteptat.
Situații similare se întâmplă în sistemele electrice care conțin componente de circuit neliniare (bobine, condensatoare, diode, tranzistoare etc.), care sunt împărțite în componente pasive (bobine, condensatoare) și componente active (diode, tranzistoare etc.). Vom discuta exclusiv despre componentele pasive, deoarece acestea sunt utilizate pe scară largă în diferite circuite electrice (ex. motoare electrice) și sunt mari consumatoare de energie.
În circuitele în care tensiunea și curentul sunt alternative, în funcție de natura sarcinii, puterea poate fi definită după cum urmează:
– putere aparentă [VA]
– putere activă [W]
– putere reactivă [VAR]
acestea sunt ecuațiile de putere pentru alimentarea monofazată, în cazul alimentării trifazate avem:
– putere aparentă [VA]
– putere activă [W]
– putere reactivă[VAR]
Dacă calculăm raportul dintre puterea activă și puterea aparentă, obținem factorul de putere:
Acum, dacă aruncați o privire la situația cu căruciorul, vedem foarte clar că atunci când unghiul a fost aproape de 90 de grade, am consumat o cantitate de energie, dar mișcarea a fost foarte mică, sau chiar zero când = , acest lucru produce un factor de putere cos foarte mic sau chiar zero dacă unghiul atinge 90 de grade, după aceea, în situația 2, unghiul a scăzut și a tins spre grade, consumul de energie s-a reflectat în mișcarea căruciorului = , produce un factor de putere cos = 1, pe scurt, am cheltuit aceeași energie ca în cazul precedent, dar căruciorul s-a mișcat mult mai mult. Deci, în concluzie, pentru a fi cât mai eficienți în ceea ce privește consumul de energie, trebuie să găsim soluții pentru a menține acest unghi cât mai aproape grade, ceea ce înseamnă un factor de putere cos care este mai aproape de 1. Acest factor de putere este puternic influențat de prezența elementelor de circuit reactive, condensatoare și bobine, care sunt principalii “vinovați” pentru care valoarea este diferită de 1. Bobina este lider în acest top, deoarece este prezentă în construcția motoarelor electrice, astfel încât, în majoritatea cazurilor, trebuie să corectăm un factor de putere inductiv. Dacă ne uităm pur și simplu la relațiile matematice ale celor trei puteri, vedem că există următoarea egalitate, care este, de asemenea, cunoscută sub numele de triunghiul puterii:
Cele două componente ale circuitului (bobina și condensatorul) se comportă diferit, dar ambele introduc o deplasare de fază de 90 de grade între tensiune și curent, tensiunea de la bornele condensatorului este în urma curentului cu 90 de grade, iar curentul electric prin bobină fiind în urma tensiunii cu 90 de grade, ceea ce este foarte util în cazul nostru dacă dorim să corectăm un factor de putere inductiv vom introduce un condensator și similar pentru un factor de putere capacitiv vom introduce o bobină (fig. 4).
fig. 4
De fapt, aplicarea unei corecții a factorului de putere înseamnă a “forța” cele două mărimi alternative, tensiunea și curentul, să oscileze în fază, deplasarea de fază dintre ele să fie zero sau foarte aproape de zero.
Exemplu de calcul
După cum am menționat deja, în majoritatea cazurilor trebuie să corectăm un factor de putere inductiv care este creat de bobine, cel mai comun exemplu fiind motoarele electrice. De obicei, pe plăcuța de identificare dată de producător, acest factor de putere este marcat cu valori între (0,6-0,9), împreună cu alte date referitoare la motor. Așadar, să luăm de exemplu un motor electric asincron cu o putere activă de 30 kW alimentat la o tensiune de 400 de volți la o frecvență de 50 Hz și un factor de putere cos = 0,8. După cum am afirmat deja mai sus, fiind o corecție a factorului de putere inductiv, va trebui să introducem în circuit un condensator pentru a aduce valoarea lui cos mai aproape de 1. Pentru aceasta trebuie să găsim puterea reactivă și, bineînțeles, care este valoarea condensatorului care trebuie introdus în circuitul motorului. Puterea reactivă poate fi dedusă din relația triunghiului puterii:
Până acum, în această relație nu cunoaștem valoarea puterii aparente, dar o putem deduce foarte simplu din puterea activă:
Astfel, puterea aparentă este:
În cele din urmă, puterea reactivă este:
În concluzie, va fi necesar să introducem în circuitul motorului, în paralel cu acesta, un condensator, care să producă echivalentul a 22,5 [kvar] putere reactivă capacitivă. Cum se găsește valoarea condensatorului? Ei bine, destul de simplu, dacă ne întoarcem la ecuația puterii reactive și o rescriem într-o altă formă, avem următoarea formulă de echivalență:
După cum se vede în ecuația de mai sus, am introdus un nou termen [] numit reactanță electrică – care poate fi, reactanță inductivă pentru bobine și reactanță capacitivă pentru condensatoare. Ecuațiile celor două reactanțe sunt următoarele:
reactanță inductivă:
reactanță capacitivă:
unde:
– viteză unghiulară [rad/s]
L- inductanța bobinei [henry]
C- capacitatea condensatorului [F]
f- frecvența [Hz]
În cazul nostru, suntem interesați de reactanța capacitivă pentru a o introduce în ecuația puterii reactive, pentru a deduce valoarea condensatorului:
Din:
obținem valoarea condensatorului:
Valoarea pentru sin va fi egală cu 1, deoarece, după cum am menționat mai sus, indiferent de elementul de circuit introdus, bobina sau condensatorul, acesta va introduce o deplasare de fază între tensiune și curent de 90 de grade. În cele din urmă, după calcule simple, s-a obținut:
Trebuie să selectăm o valoare cât mai apropiată de valoarea calculată, dacă există, sau trebuie montate mai multe condensatoare în paralel până când obțineți o valoare mai apropiată.
Tehnologia a depus cereri și mai multe companii au dezvoltat controlere speciale pentru a menține factorul de putere la un nivel mai apropiat de 1, în special în mediul industrial, unde există zeci sau sute de motoare, iar acest factor variază continuu în funcție de câte motoare funcționează la un moment dat, iar un astfel de controler este foarte important. Funcționarea acestor controlere este destul de simplă, un număr de valori diferite ale condensatoarelor vor fi instalate într-un panou, iar controlerul va conecta sau deconecta tot timpul numărul necesar de condensatoare, astfel încât valoarea factorului de putere să fie menținută aproape de 1.
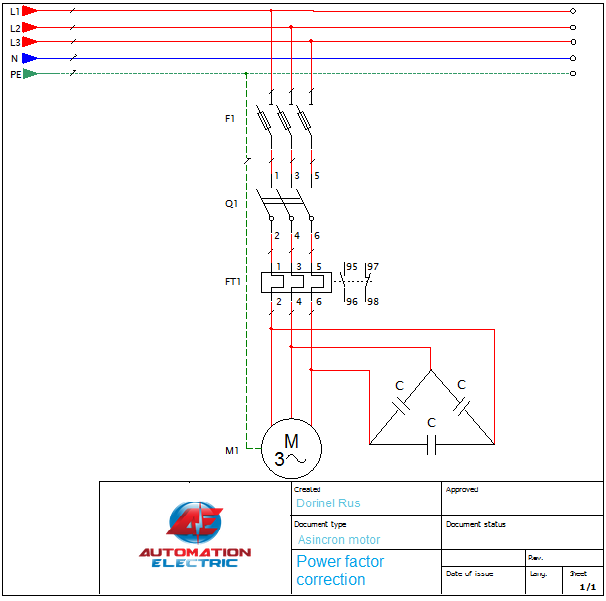
Un desen simplu despre cum să conectați aceste condensatoare la un motor este prezentat la începutul acestui articol.
Trebuie să fii autentificat pentru a publica un comentariu.
Acest site este înregistrat pe wpml.org ca site de dezvoltare. Comutați la o cheie de site de producție pentru remove this banner.
We use cookies to ensure that we give you the best experience on our website. If you continue to use this site we will assume that you are happy with it.
Folosim cookie-uri pentru a ne asigura că vă oferim cea mai bună experiență pe site-ul nostru. Dacă continuați să utilizați acest site vom presupune că sunteți mulțumit de el.